
Tesla 透過申請多項與其 Optimus 機器人計劃相關的新專利,揭示了一些人形機器人技術。
幾個月前, Tesla 推出了「Optimus Gen 2」,這是其人形機器人的新一代版本,應能接手人類的重複任務。
與之前表現不佳的版本相比,新原型展示了許多改進,為該項目增添了一些可信度。
Optimus Gen 2 的主要變化之一是 Tesla 現在使用全部自家設計的定製執行器來驅動機器人的四肢。
現在, Tesla 已經申請了幾項與其人形機器人技術相關的專利。
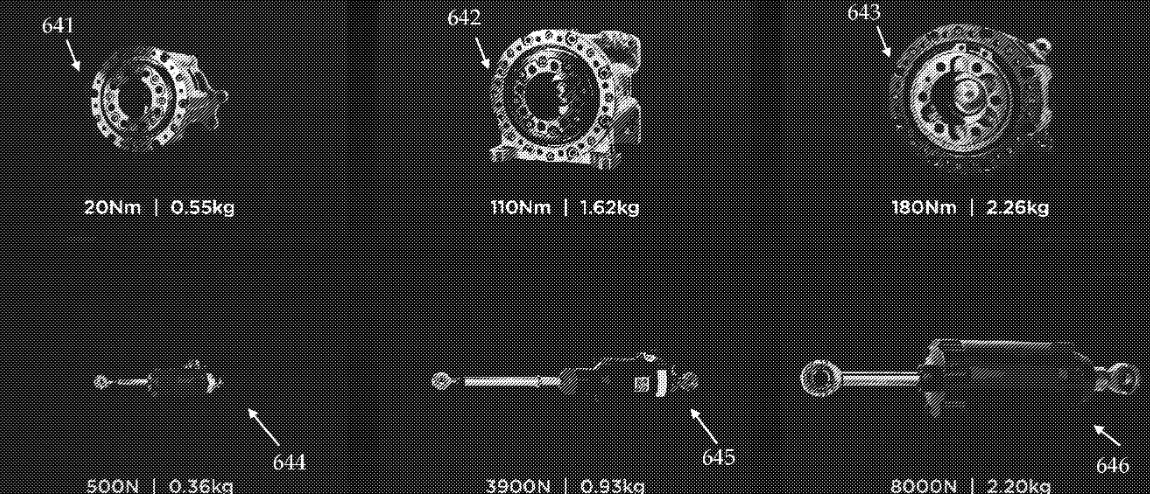
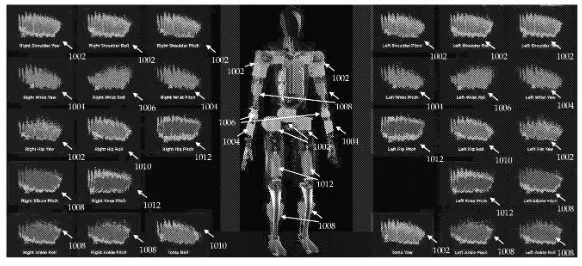
在第一項專利中, Tesla 描述了其「執行器及執行器設計方法論」:
一種使用執行器控制機器人(600)運動的系統或方法論,該系統可以包括一個或多個第一類型的執行器(1002)定位在機器人的軀幹、肩膀和臀部;一個或多個第二類型的執行器(1004)定位在機器人的手腕位置;一個或多個第三類型的執行器(1006)定位在手腕位置;一個或多個第四類型的執行器(1008)定位在肘部和腳踝位置;一個或多個第五類型的執行器(1010)定位在軀幹位置和臀部;以及一個或多個第六類型的執行器(1012)定位在膝蓋位置和臀部。
這裡是該專利申請中的一些圖紙:
有趣的是,第一代 Optimus 在這些圖紙中被展示。
其他專利申請中展示了新的 Optimus 圖像。
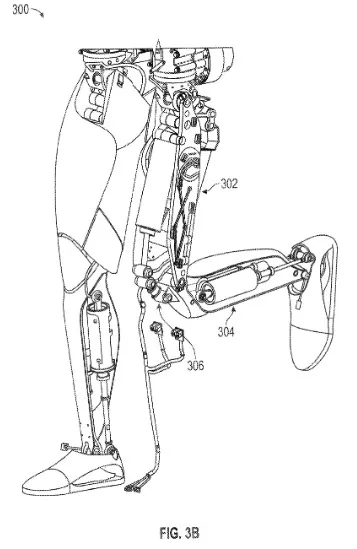
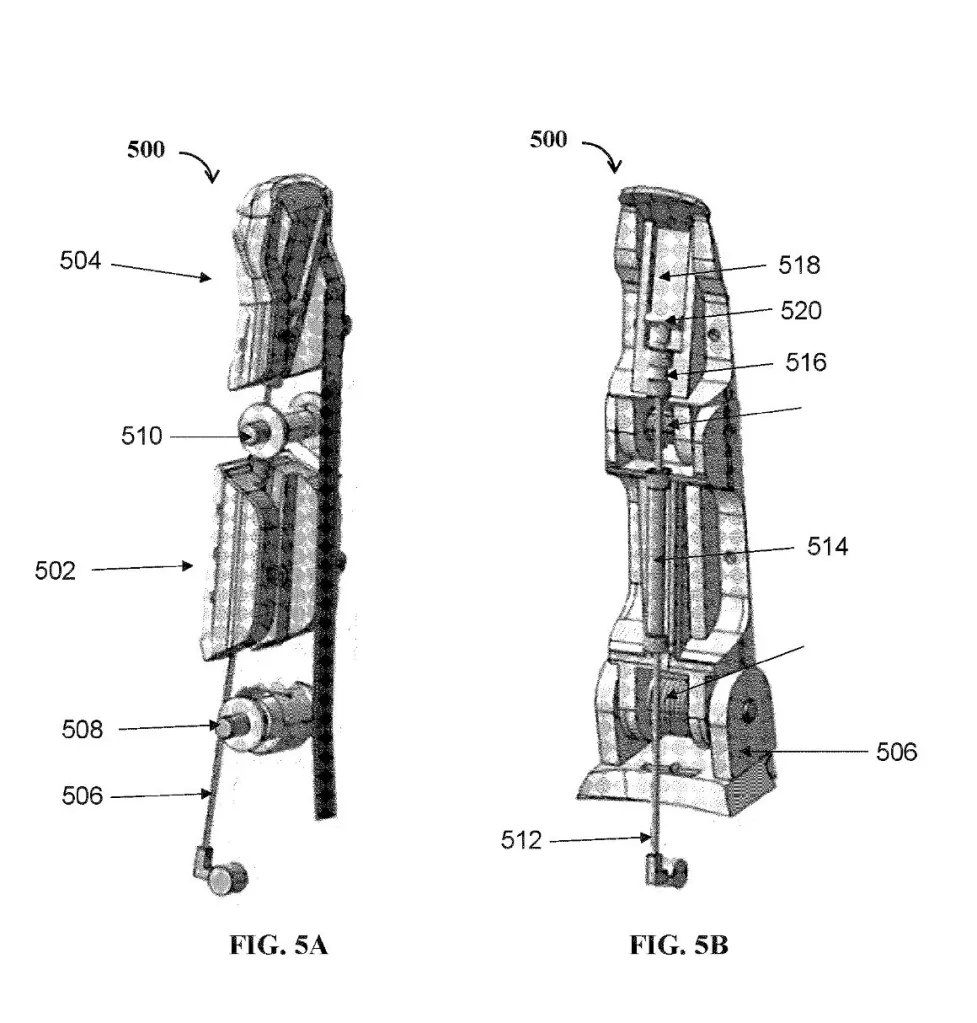
下一項專利名為「機器人膝關節組件的系統和方法」,顧名思義,它專門關於機器人的膝關節。
Tesla 在其專利申請中描述了技術:
本文揭示了一種膝關節組件,包括一個第一連接件,其一端機械地連接到機器人的上腿,並配置為相對於上腿圍繞第一樞軸旋轉,以及一個第二連接件,其一端機械地連接到機器人的下腿。下腿可以機械地連接到上腿並配置為相對於上腿圍繞第二樞軸旋轉。一個線性執行器裝置可以機械地連接到第一連接件的第二端和第二連接件的第二端,當激活時,可以使第一連接件相對於機器人的上腿圍繞第一樞軸旋轉,並使腿相對於上腿圍繞第二樞軸旋轉。
這裡是該專利申請中的一些圖紙:
我們發現的最後一項專利申請特別有趣,因為它特別關於 Tesla Optimus 的手。
該專利申請名為「帶有電纜驅動手指的欠動作手」。
Tesla 在專利申請中寫道:
一個機器人手系統可以包括一個掌區和一個或多個手指,每個手指包括一個執行器裝置;一個近端部件,其一端機械地連接到掌區機器人,並配置為相對於掌區圍繞第一樞軸旋轉;一個遠端部件,其一端機械地連接到近端部件的第二端,並配置為相對於近端部件圍繞第二樞軸旋轉;以及一條電纜,其第一部分連接到執行器,第二部分沿近端部件和遠端部件延伸,第二部分遠離第一樞軸和第二樞軸,並且具有一個比電纜直徑更大的端部,當電纜被執行器拉動時,該端部具有更大尺寸結構以與遠端部件接合。
這裡是該專利申請中的一些圖紙:
在 Tesla 展示的最新機器人原型的最新預覽中,我們可以看到手部靈活性大大提高。
Tesla 將機器人投入生產的具體時間表尚不清楚,但 Tesla 首席執行官埃隆· Elon Musk 在 2022 年表示,它可能最快在 2023 年投入生產——儘管這並未發生。

